研究概要RESEARCH
ロボティクス研究室では,産業応用を念頭においたロボットの研究を行っています。
産業用ロボットとしてよく知られているマニピュレータ型ロボットのほかに,歩行型ロボット,コンピュータビジョンなどロボット工学(ロボティクス)に関連した幅広い研究を行っています。
現在,二足歩行ロボット,多自由度マニピュレータ,スライダーロボット,ハンドアイシステム, ステレオビジョンによる物体認識,などの製作および実験に取り組んでいます。
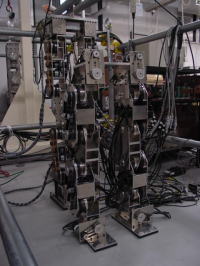
搭乗型二足歩行ロボット「プリモ」 Manned Bipedal Robot "Primo"

全高が約4mの大型二足歩行ロボットを製作しました。現在も改造を重ねています。
「Primo(プリモ)」は人が乗って操縦する搭乗型二足歩行ロボットであり,脚部に6×2関節,腕部に7×2関節,腰部に1関節,両足の足裏にローラ2軸(動軸)の,計29個の駆動部を備えています。
プリモ本体のほかに,リモートコックピットを製作しました。本体頭部の内側に360度視界カメラを備えていて,そのライブ映像をリモートコックピット内でVRゴーグル装着して見ることができます。リモートコックピット内には,左右の腕を操作する操縦桿と,両足で脚や腰を操作するための操縦パッドが備えられています。
プリモの研究開発は,今後も継続して進めていきます。
二足歩行ロボット Biped Robot
二足歩行システムとは,人間のように2本の足で歩行するロボットおよびその周辺のシステムのことです。
現在,本研究室では,8自由度(片脚4関節)の二足歩行ロボットを製作しました。 これを利用して,ロボットの着地衝撃力・跳ね上げ力の緩和や最適な歩き方,様々な歩き方についてシミュレーション・実験を行っています。
多脚ロボット Multi-legged Robot

全長150cm,全幅90cm,全高70cmの大型多脚ロボットです。重量はおよそ100kgで,さらに100kgの荷重を搭載することができるよう設計しました。
前方と後方にあわせて6本の脚があり,各脚2関節ずつの全部で12関節を使って歩行します。
脚の先端には半円型の足先を備え,1歩あたりの踏みだし距離を大きくしてあるのが特長です。
ステレオビジョンシステム Stereo Vision System
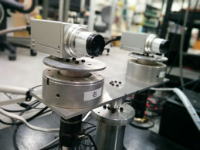
ステレオビジョンシステムとは,独立に動くことのできる複数のカメラを用いて環境を認識するシステムのことで,人間の頭部(首と両眼)もこのシステムと同様の仕組みが備わっています。
人間は右眼と左眼を連携させながらも独立に動かすことが可 能です。さらに眼だけではなく首を回して広い範囲を見たり,見やすい方向に顔を向けたりすることができます。3自由度(右眼,左眼,首部)のステレオビジョンロボットを製作し,認識のための様々な姿勢,最適な姿勢について実験・研究を行っています。
ハンドアイシステム Hand-eye System

アクティブビジョンシステムとは,撮像系(たとえばCCDカメラ)の位置や向きを自由に変えることによって,より多くの情報を獲得できるシステムのことです。
従来の固定位置,固定方向に設置された撮像系では困難であった3次元物体情報の取得を容易にするといった利点があります。実用に際しては,物体把持のための3次元物体認識
や,映像監視,形状検査の自動化などに応用できます。
現在,水平多自由度マニピュレータの手先にカメラを搭載し,画像処理と動作制御を同時実行させるシステム(ハンドアイシステム)を構築しています。
7自由度マニピュレータ 7-DOF Manipulator

多自由度マニピュレータとは,人間の腕の様な構造をしたロボットのことで,産業 用ロボットの一つの形態として知られています。7つの回転軸を有する冗長多自由度
マニピュレータは人間の腕と同じ機構になっています。
現在,7自由度垂直多関節マニピュレータと画像処理装置を組み合わせた光源推定動作制御について研究を行っています。物体への光のあたり方に応じて自動的にカメ ラの姿勢を変える制御を行っています。
カラー画像処理 Color Image Processing

一般に防犯カメラや画像検出装置などで用いられる産業用カメラは白黒画像を扱うことが多いようです。カラー画像情報を用いることで,見ることのできなかった物体を自動認識することが可能になります。
カラー画像は白黒画像に比べて情報量が多いため,リアルタイムで画像処理するには多くの計算量を必要としますが,当研究室では安価なパソコンでも十分に使えるアル
ゴリズムを研究開発しています。
スライダーロボット Slider Robot

スライダーロボットは,直線的に移動するカメラを搭載したロボットです。
本研究室では,画像処理等を行うために,カメラ部分が回転するようにターンテーブルを搭載しました。これを利用して,物体の3次元形状の認識や,位置・姿勢推定する研究を行っています。
バナースペース
成蹊大学ロボティクス研究室
〒180-8633
東京都武蔵野市吉祥寺北町3-3-1
成蹊大学 11号館401室・14号館101S室